
 Research Directions
Research Directions Research Directions
Research Directions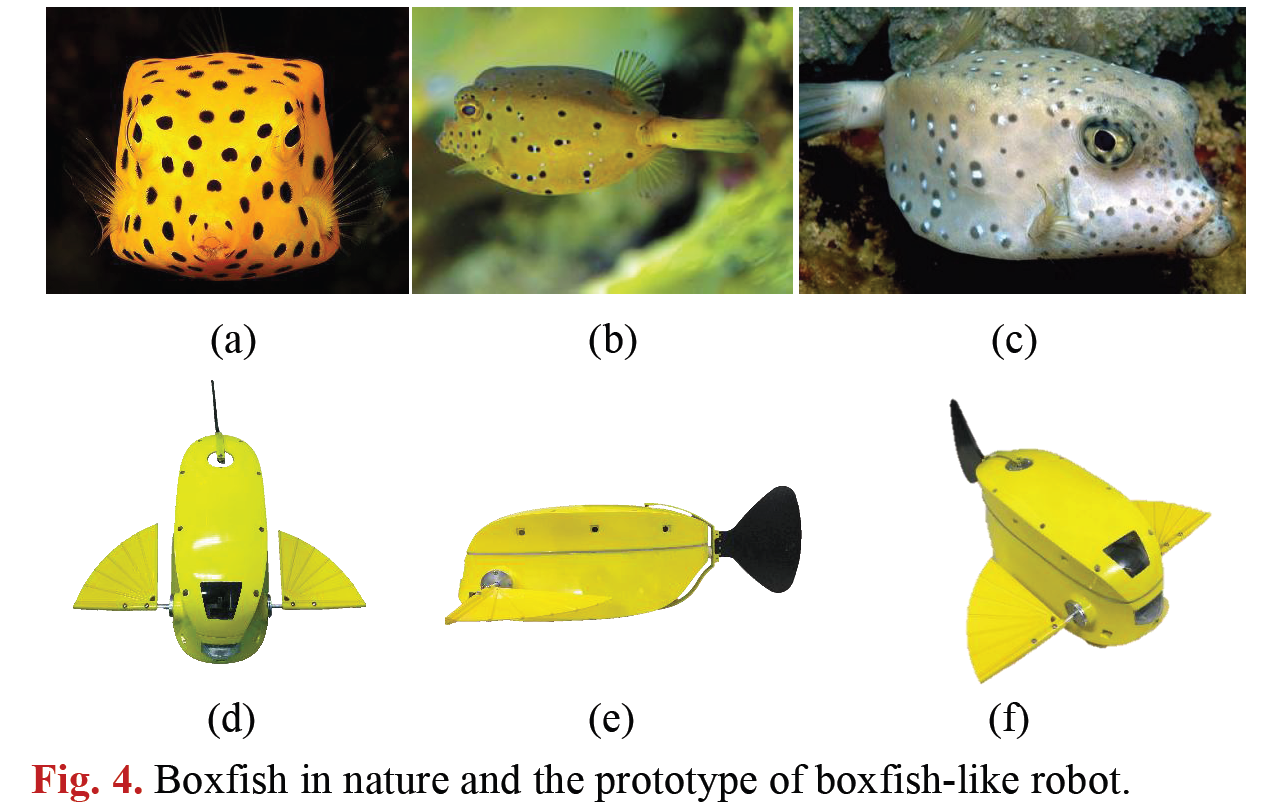
Biomimetic Underwater Robots
Organisms have probably existed in the world for hundreds of millions of years. Their perfect physical structures and excellent locomotion properties emerging from the continuous long-period evolution fascinated all researchers who hope to design better mobile robots. Inspired by aquatic organisms, we design kinds of biomimetic underwater robots.
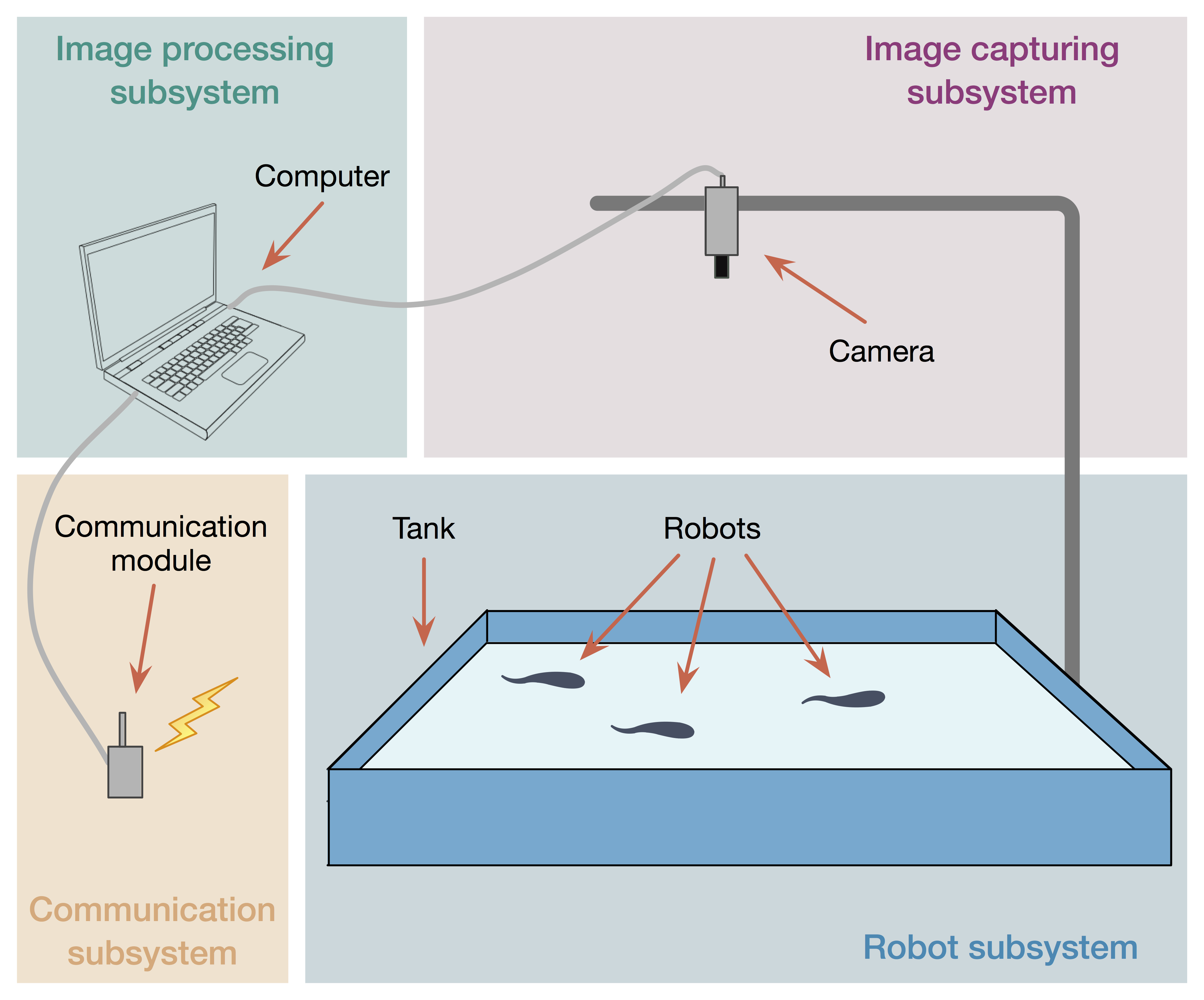
Tri-Co Robots
Mechanism of swarm coordination is one of the key technologies for multi-robot cooperation which has an important application value. We focus on the theory of smart swarm control which combines multi-agent systems and the evolutionary games theory, and conducts experimental research on the cooperation of multiple underwater robots.
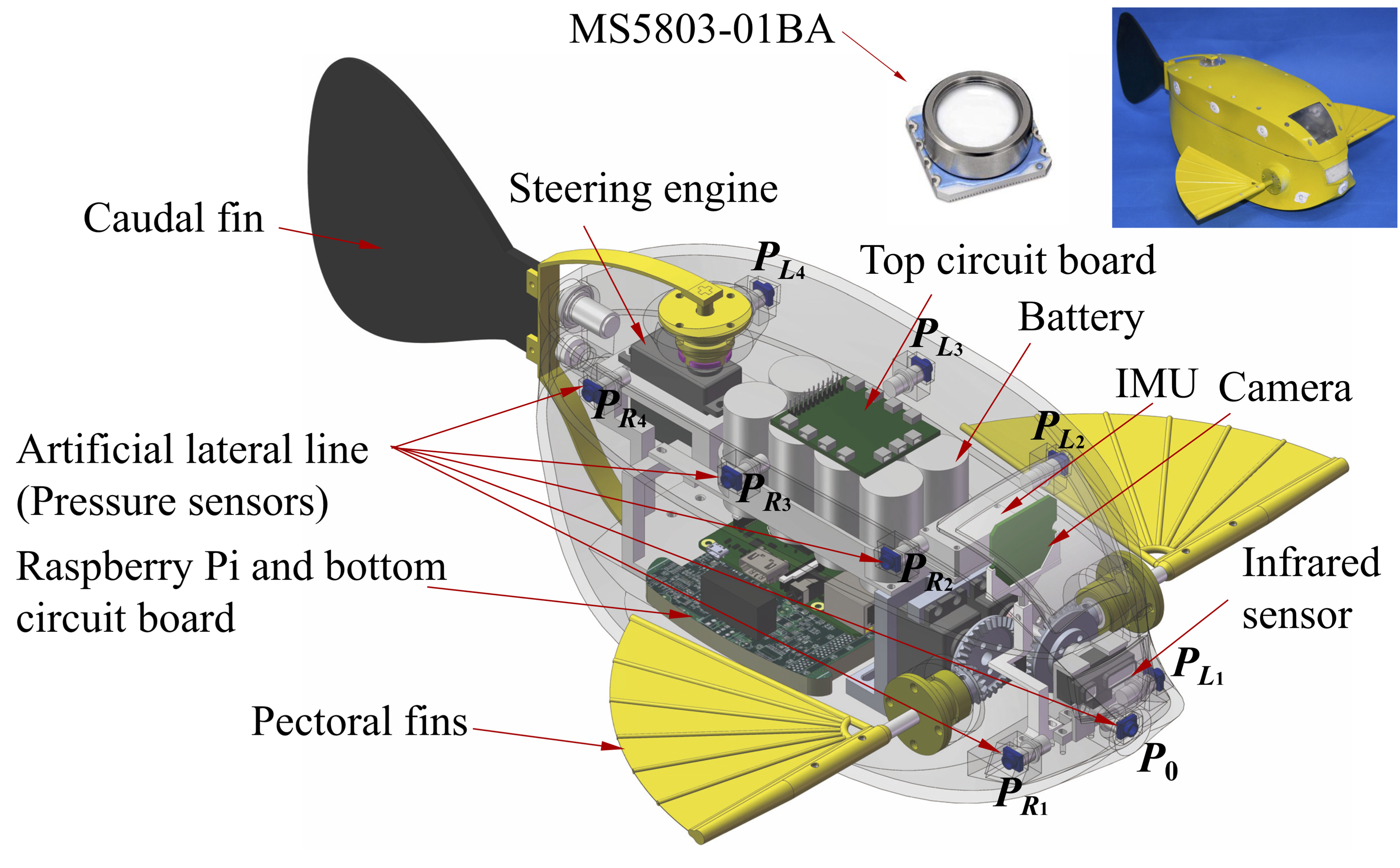
Biomimetic Underwater Sensing
Lateral line system is a mechanoreceptive organ system which provides fish with flow-relative information. Inspired by this typical biological phenomenon, we study how a robotic fish uses its onboard artificial lateral line system (ALLS) to sense the Kármán vortex street-like vortex wake generated by its adjacent robotic fish, thus sensing its relative position and attitude to its neighbor, and the oscillating state of its neighbor. We are working on applying such a mechanism to formation control of a robotic fish group.
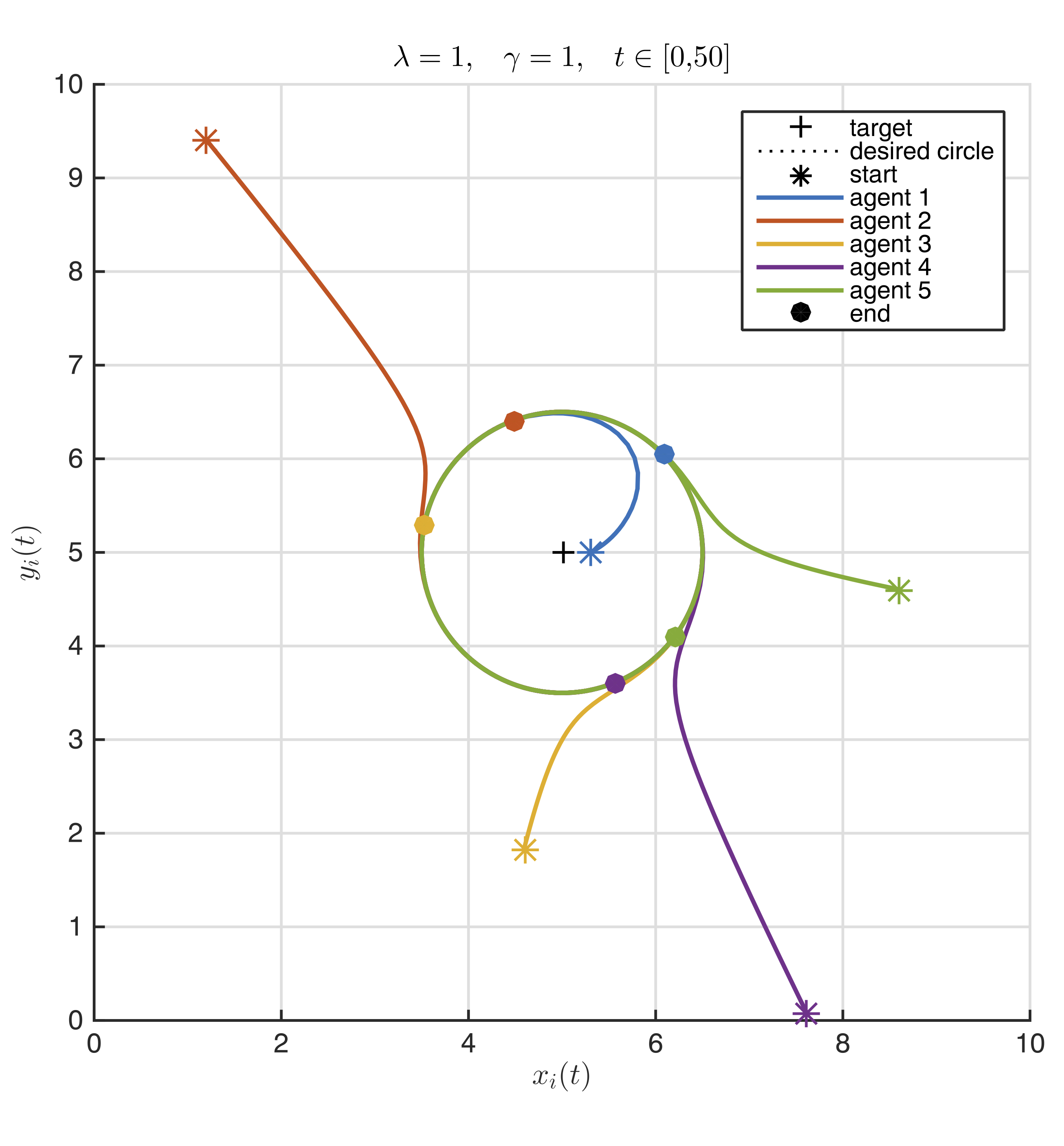
Multi-agent Systems
The related research of multi-agent systems coordination technology is the frontier of control field. Intuitively speaking, it consists of a certain number of autonomous individuals who, through mutual cooperation and self-organization, present an orderly coordinated movement and behavior at the collective level. Currently we are working on cooperative control of multi-agent systems using event-triggered mechanism, control theory, graph theory, game theory and reinforcement learning together.
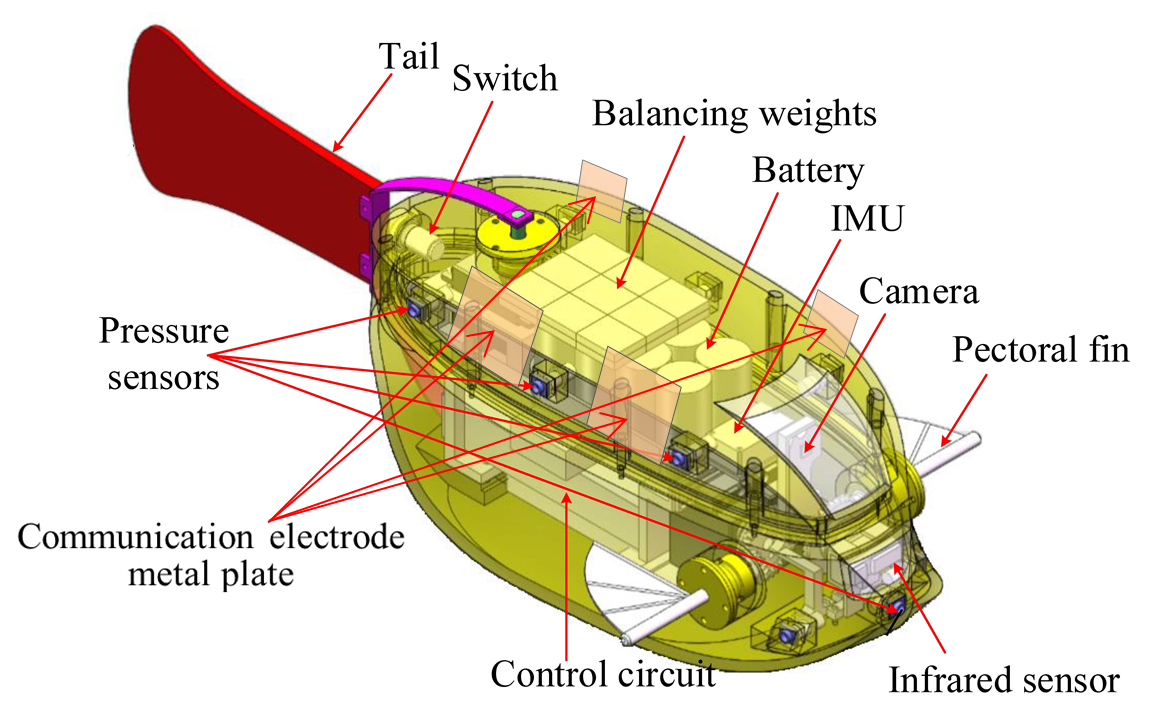
Underwater electrocommunication
Communication is a very important topic in the study of underwater robots. Inspired by the weakly electric fishes using an electric field to communicate efficiently, we developed a near - range, stable, low-power-consumption and strong-environmental-adaptability method called underwater electrocommunication . Our laboratory is committed to developing and upgrading the embedded system based on underwater electrocommunication, and applied on underwater robots to achieve the functions such as underwater communication, networking, positioning and navigation, etc.
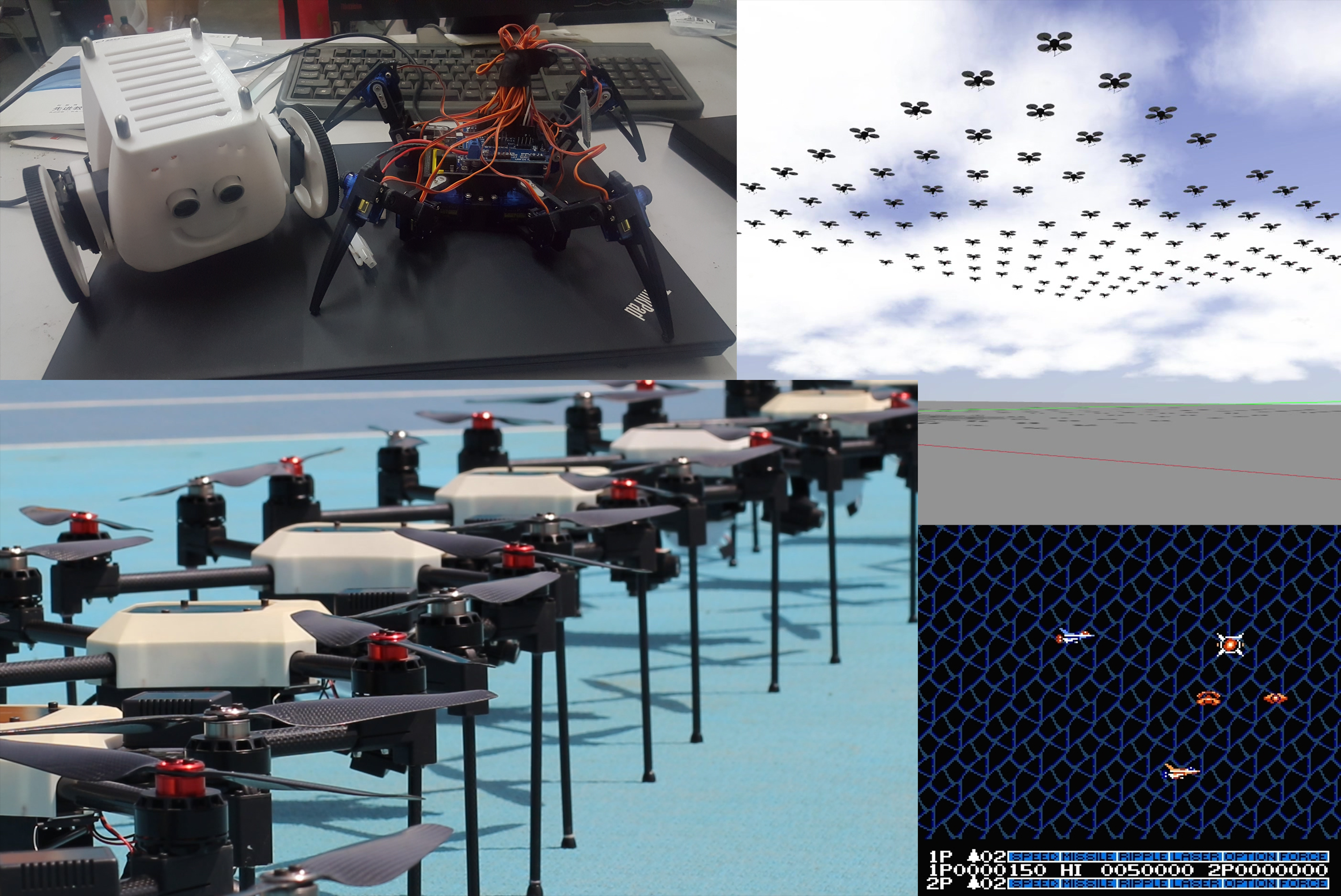
Drone Swarm Intelligence
We are developing a heterogeneous robot clustering platform based on multi-agent reinforcement learning. At present, we build a heterogeneous robot clustering platform based on the existing bionic robots developing by our laboratory. The agent unit includes multi-joint bionic robotic fish, quadrotors, robot ships, land vehicles, and quadruped robots. Use the above platform to study cluster behaviors of different kinds of agents based on reinforcement learning.
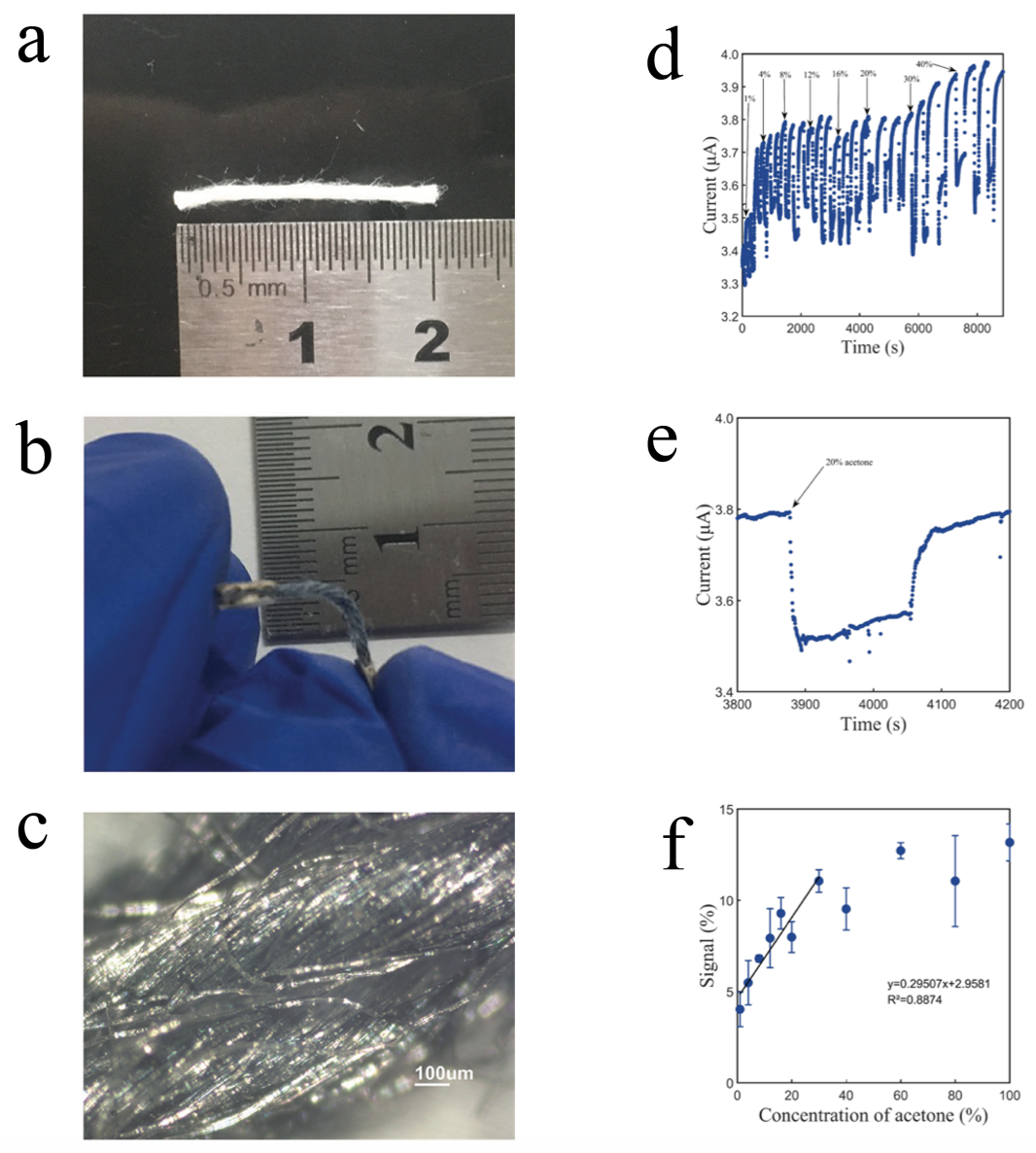
Bioelectronics
Bionic electronics is a field of study that aims to achieve biological functions through electronic devices, more specifically, designing and fabrication of devices to realize specific functions such as material sensing and signal transmission. Various biomimetic materials and conductive materials are integrated for manufacturing of biomimetic electronic sensors. To make devices that have unique properties, studies are carried out on material selection, structure processing, device manufacturing, system composition, and electrical signal measurement.
