

 Highlights
Highlights Prof. Guangming Xie Research Group of College of Engineering Has Made a New Progress in Multi-agent Systems
Prof. Guangming Xie Research Group of College of Engineering Has Made a New Progress in Multi-agent Systems
Recently, Prof. Guangming Xie's Group has made a series of research progress in formation control for multi-agent systems and corresponding results have been published in top international journals of control science, such as IEEE Transactions on Automatic Control and Automatica.
The multi-agent systems involves multi-discipline such as control, mathematics, biology, physics, computer, robot, communication and artificial intelligence. It is one of the important research directions in the multidisciplinary in current years and has received extensive attention from all kinds of scholars.
Prof. Xie's group is the person who started the research on multi-agent systems earlier in our country and emphasis is placed on the application of multi-robot cooperative control and has achieved innovative results in several directions. On the basis of the previous research, Prof. Xie’s group further studied the formation control of multi-agent systems, especially for the circle formation problem, and achieved in-depth results.
Firstly, Prof. Xie and his collaborators have proposed a distributed control protocol to achieve arbitrary circle formation for the first-order multi-agent systems, and strictly proved the convergence of the control protocol. It is theoretically rigorously proven that the proposed control protocol has an important characteristic of maintaining collisions between individuals in the process of forming the desired circle formation. The authors have further studied the control protocol under sampled data framework and the finite-time control protocol that can guarantee the formation of the desired circle formation for any given finite time. In addition, the relevant results are extended to second-order systems. The results were published in IEEE Transactions on Automatic and Control (C. Wang, G. Xie, M. Cao, Forming circle formations of anonymous mobile agents with order preservation, IEEE Transactions on Automatic Control, 58(12), 3248–3254, 2013)。
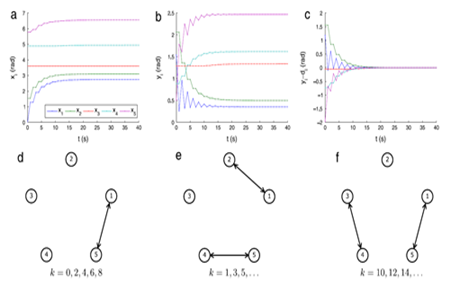
Taking the characteristic of some robots that cannot retrogress during movement into account, Prof. Xie and his collaborators have studied the circle formation problem for multi-agent systems with unidirectional motion, while a distributed control protocol based on sampling control has been proposed. The convergence of the proposed protocol has been strictly proved and no collision took place between individuals in the whole process. It is worth noting that such systems are restricted dynamic systems and cannot be processed relied on traditional Lyapunov stability methods. To this end, the author have obtained a comprehensive understanding of the system through a large number of simulations and discovered that the phenomenon of stationary immobile individuals always appeared during the operation of the system. Moreover, a rigorous proof, the strict and complete proof of the convergence of the protocol has been provided based on the observed characteristic. The results were published in Automatica in the form of Regular Paper (C. Wang, G. Xie, M. Cao, Controlling anonymous mobile agents with unidirectional locomotion to form formations on a circle, Automatica, 50(4), 1100–1108, 2014).
The Corresponding author of the two papers was Prof. Xie, and the first author Dr. Wang Chen was member of Prof. Xie group. This research was supported in part by grants from the National Natural Science Foundation of China(NSFC). The project collaborators include Professor Ming Cao of the University of Groningen in the Netherlands.
PKU NEWS:http://pkunews.pku.edu.cn/xxfz/2014-05/04/content_282730.htm
COE NEWS , PKU:http://www.coe.pku.edu.cn/research-news/3535