

 Highlights
Highlights The Bionic Koi
The Bionic Koi
The bionic koi is a three joint robotic fish developed by the Intelligent Biomimetic Design Lab of Peking University.

Figure 1
The overall structure of the robotic fish is mainly divided into three parts: fish head, fish body and fishtail. The fish head is composed of a control circuit board, a battery, a communication module, a power switch and pectoral fins, and a blow hole and a charging port are reserved on the fish head. The fish body part is made up of three oscillating joints, and the fish body surface is wrapped by a rubber sheath to play a waterproof role. Sometimes, it is necessary to inflate the inside of the machine fish to ensure that the fish has sufficient buoyancy. The switch is inside the rubber sheath.
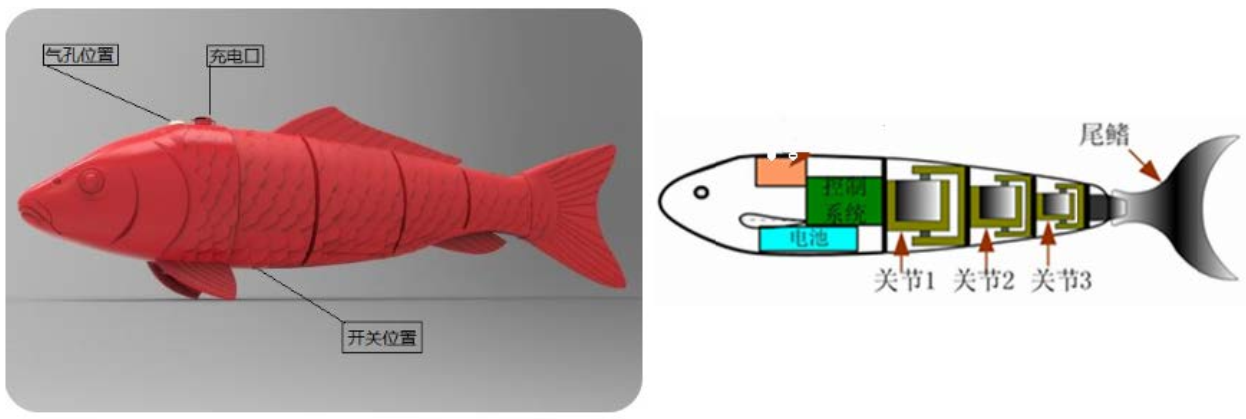
Figure 2
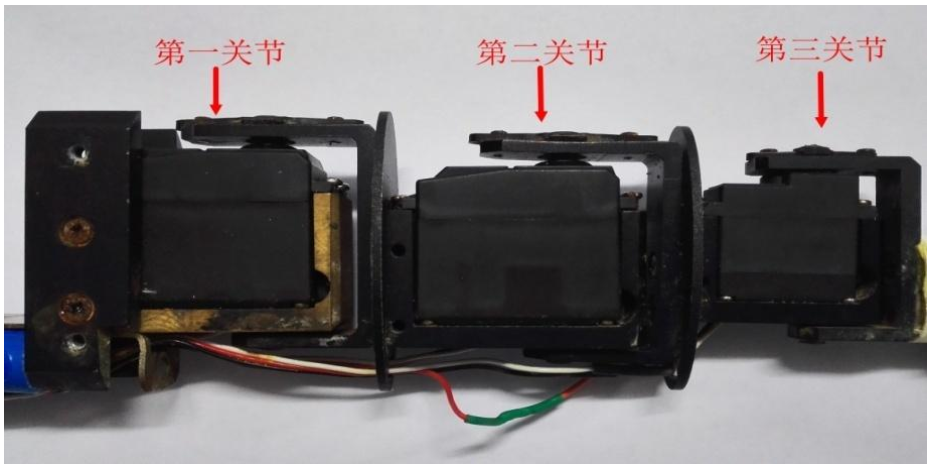
Figure 3
The platforms for controlling robot fish include cameras, pools, computers, launch modules, robotic fishes, and operation software. The camera collects the image (the coordinates of the fishes and the balls), then processes it through a large platform. Strategy is loaded to the platform at the same time, and then orders are send to the robot fish through the USB module. The robot fish perform the corresponding action after receiving the command.
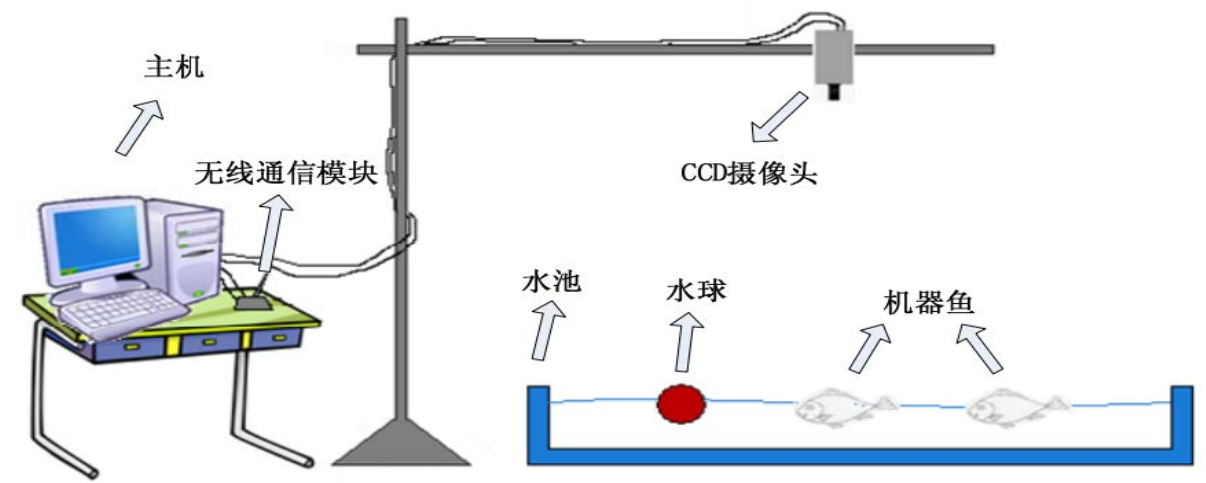
图4