

 Highlights
Highlights Robo-Shark Underwater Robot
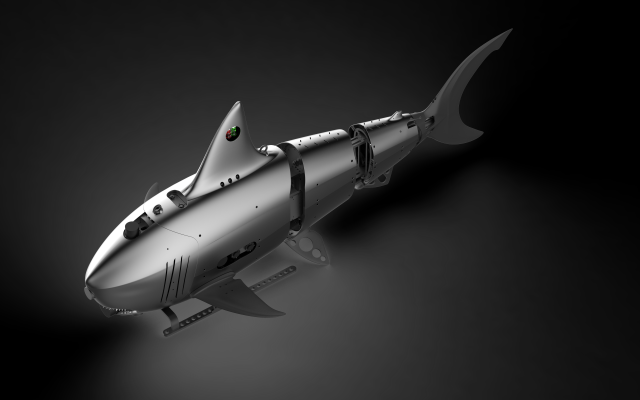
Robo-Shark Underwater Robot
Recently, the research team led by Professor Guangming Xie of the College of Engineering of Peking University successfully developed underwater robot- RoboShark, a bionic robot based on sharks, and successfully complete the system integration test.
The RoboShark is a prototype of the Carangidae, and it is the first generation of industrial underwater bionic robots in China. The RoboShark has features such as low power consumption, high propulsion speed, and flexible steering, which can meet long-term navigation and large-scale underwater operation requirements, and has become a research hotspot in the underwater submarine field. The robot uses a three-joint bionic tail fin as a power mechanism, using the anti-Karman vortex street driving principle, to improve energy efficiency while effectively reducing the operating noise, suitable for long-term underwater cruising. The suction and drainage tank is designed separately to realize the self weight adjustment to float and dive by suction and drainage. The motion of RoboShark control is flexible, and the underwater depth hovering can be realized, the maximum diving depth can reach 300m. The RoboShark which carrying communication module is connected to the ground base station through the radio frequency antenna, and the farthest control distance can reach 3km. The RoboShark has a large load capacity, the front and non swing parts of the fish body are loaded with sonar unit and camera module on both sides of the body, which can achieve target retrieval, independent obstacle avoidance, topographic and geomorphological drawing of the sea terrain, etc.
The robotic fish underwater propulsion technology has a high application value in the marine inspection, lifesaving and military fields. This project has conducted a basic theoretical study on the dynamic characteristics of the fishes in this species. The entire fish body is divided into two parts, the body and tail fins. The body is simplified into a slewing body with a streamlined profile. Using the basic idea of the plate flow model as a starting point, the formula for the frictional resistance of the streamlined body under the two flow states, laminar and turbulent flow, is deduced, in a two-dimensional flow field. Under the condition of two-dimensional flow field, the resistance characteristics of three typical streamline profiles of Carx streamline, semi ellipse and parabolic streamline and double semi elliptical streamline are studied, and the contour features of streamlines with relatively good traveling resistance performance are obtained by comparison and analysis. Based on this, the three-dimensional flow field resistance characteristics of the two streamlined bodies with variable geometric parameters are studied, and the pressure resistance, frictional resistance, total resistance, and total resistance coefficient are adopted. The analysis can obtain the influence of geometric parameters of the profile on the drag resistance. The hydrodynamic characteristics of the tail fin include: The mathematical modeling of the motion parameters of the tail fin. The two-dimensional flow field simulation of the hydrodynamic force of the tail fin is studied by dynamic grid technology. The average pushing force and the average propulsion efficiency of the tail fin are calculated by extracting the propelling force, lateral force and torque. On the basis of this, the effect of variable maximum angle and variable phase difference on hydrodynamic performance is further discussed. Then the profile of the tail fin is fitted, and the hydrodynamic characteristics of the three-dimensional flow field are studied. The influence of the change of the geometric parameters of the tail fin on the hydrodynamic performance is analyzed. Finally, the hydrodynamic characteristics of the tail fin are qualitatively discussed according to the image information of the flow field.
The research of this project has laid a theoretical foundation for the research work of Carangidae-like underwater robots, and provided an experimental model for the future research work. The engineering machine has been made in this project and can be customized based on actual needs. The main performances parameters are as follows:
1) Endurance: 15 days (glide propulsion) / 8 hours (caudal fin propulsion)
2) Maximum dive depth: 300m
3) Navigation: GPS, Inertial Navigation
4) Communication distance: 3km (in open water)
5) Maximum cruise speed: 1.5m/s, five speed level adjustable
6) Maximum load capacity: 25kg